Build an AI+embodied intelligence terminal platform
Transform human lifestyles



Multimodal Space-Time Sensing Fusion System

Data Collection and Simulation Closed-Loop Platform

High-Precision Mapping and Multi-Source Positioning System

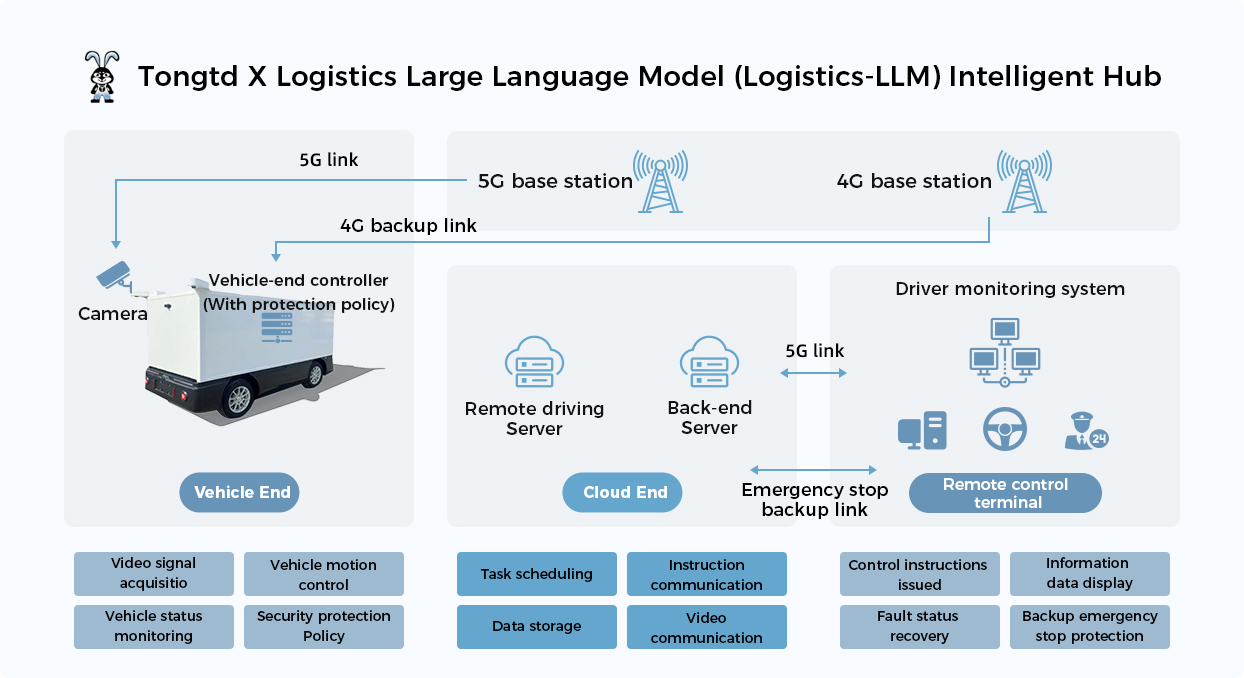
Logistics Large Model Intelligent Operation Platform